Ch2-Configuration Space(C-Space)
Summary:
- 构位空间(Configuration Space): 顾名思义,构位即机器人系统的明确描述(每个点都能精确定义,涉及到自由度的概念也可以解释为每个自由度的位置都确定);而构位空间指的是所有构位组成的控件。
- 自由度(Degrees of Freedom):在介绍构位空间之前引入的概念,以及计算自由度的公式Grübler’s Formula
- 工作空间(Workspace):机器人所在的空间(欧式),也可以指的是末端可达的空间,和具体执行的任务无关。
- 任务空间(Task Space):涉及到具体的任务所表述的空间,例子是在纸上写字,task space 约束在二维平面而不是三维。
- C-Space 描述:显式参数,关节空间的描述,坐标系数量和自由度数量一致。隐式约束,m个坐标系,m-n个约束,n个自由度,此时C-Space可以看做是m维空间中嵌入的n维曲面。
Grübler’s Formula
计算自由度的方法:
\[dof=m(N-1-J)+\sum_{i=1}^{J}f_i=m(N-1)-\sum_{J}^{i=1}c_i\]该方法计算出来的自由度是实际自由度的一个下界[特例:parallelogram linkage]
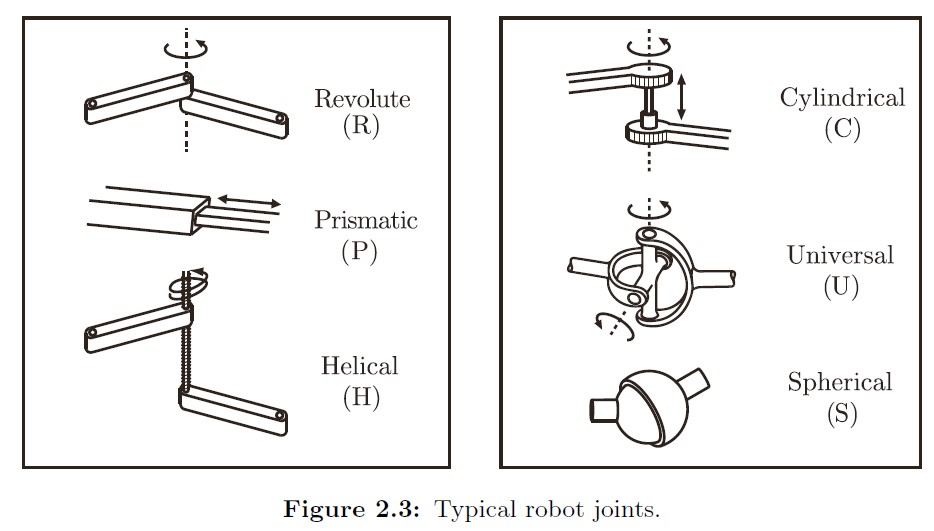
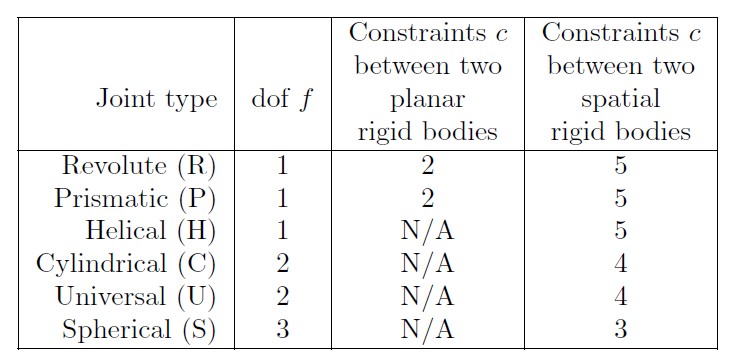
对于平面机器人来说m = 3,对于空间中的机构m=6。
计算例子在作业中可以练习。
C-Space的表达
C-Space可以用向量来表达,但是和参考系和坐标轴的选取有关系,但是他的拓扑结构是确定不变的。
这里涉及到显式坐标系表达(关节空间)以及隐式约束表达。显式表达往往会存在奇异点(Singularities)比如位置的突变,而隐式则没有这个问题。Lynch 在这本书中贯穿的思想就是用隐式表达,带有6个约束的3x3的姿态矩阵来表达姿态,这样可以利用线性代数进行计算。[四元数或者其他一些表达也具有非奇异性质,但是也有各自的问题,一个姿态对应两个四元数,改进的Rodrigues参数貌似解决了一些问题?]
构位和速度的约束
如果机器人带有闭链,此时用隐式约束能更方便的表示构位。
对有n个关节的带闭链的机器人,定义闭链约束方程:
\[g(\theta)=\begin{bmatrix} g_1({\theta_1,...,\theta_n}) \\ ...\\g_2({\theta_1,...,\theta_n}) \\ \end{bmatrix}\quad = 0\] \[\to \frac{d}{dt}g(\theta(t)) = 0\] \[\frac{\partial g}{\partial \theta}(\theta)\dot{\theta}=0=A(\theta)\dot{\theta}, A(\theta)\in \Bbb{R}^{k\times n}\]可以看到闭链结构的关节速度存在约束,这也叫做Pfaffian Constraints,此时速度的约束到位置的约束关系是不可积分的。这种不可积分的约束也被叫做 Nonholonomic Constraint 。
由于这种约束的存在,会导致系统当前状态下速度的可行解维数降低,但这并不意味着可达C-Space的降维。
(简单例子:硬币只能往前滚动或者原地旋转,并不能侧移,但是经过类似侧方停车的操作,在空间位置上最终能间接实现侧方移动)
Example & HomeWork
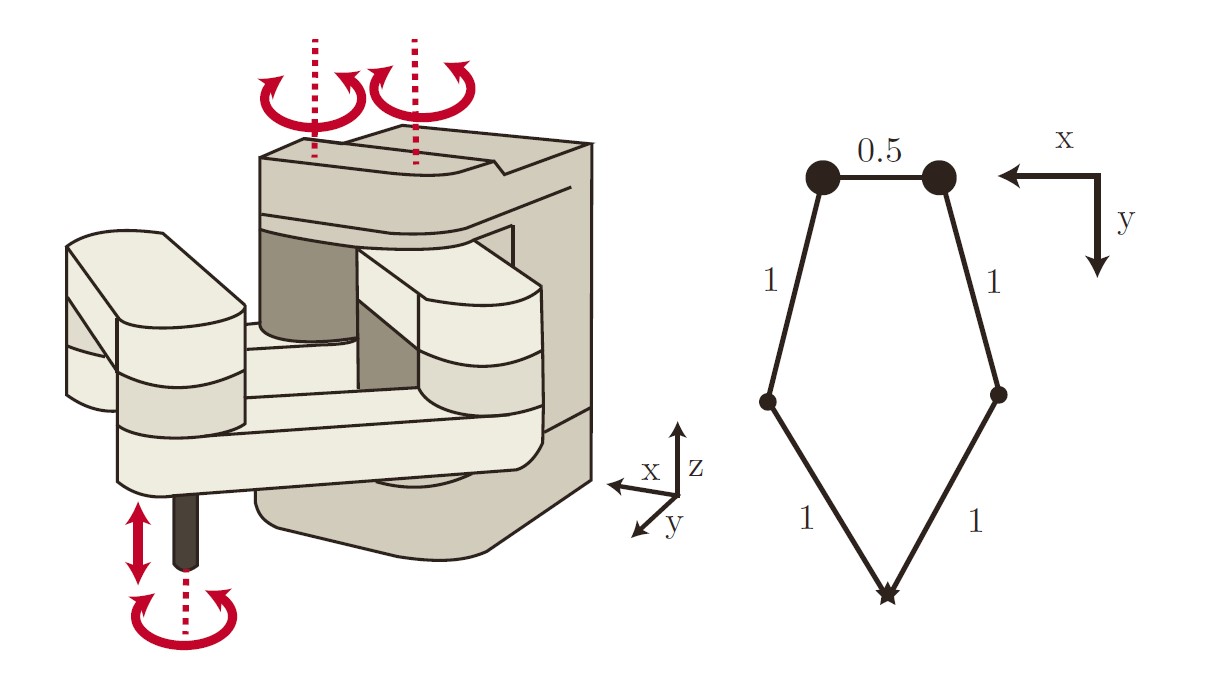
Delta Robot(3-DOF)
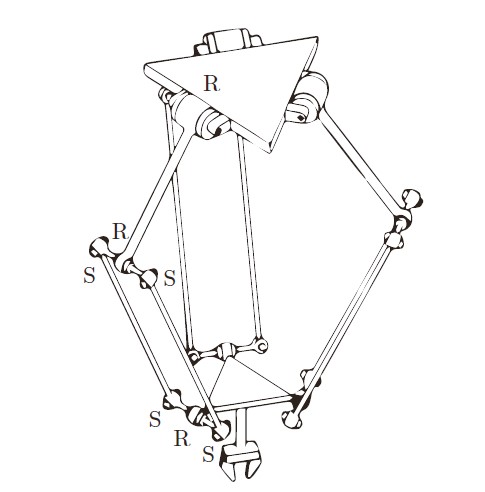
如图所示的Delta Robot,如果用Grubler公式进行计算: \(dof=6(17-1-21)+9\times1+12\times3=15\) 然而实际末端的自由度只有3个(笛卡尔空间xyz方向的运动),另外12个自由度由平行机构限制。
C-Space of N-Dimentional Space Rigid
n=2时,C-Space为平面上点的坐标加上一个方向(可以理解为绕垂直平面的一个旋转)
\[\Bbb{R}^2\times S^1\]n=3时,C-Space是空间中的点坐标加上三维姿态的朝向,关于姿态可以首先在该点为球心的球面上找一个方向,绕该方向将三个坐标轴之一对齐,然后剩下的二维平面坐标系再从垂直于平面找一个轴旋转对齐即可。所以关键是旋转轴的选取需要在n-1的Sphere上进行。
因此当n>3时,也可以理解C-Space是
\[\Bbb{R}^{n}\times S^{n-1}\times S^{n-2}\times ...\times S^{1}\]人手臂建模(7-DOF)
例子之一,建模方式多种多样,一般保证自由度为7即可。
挖掘机自由度
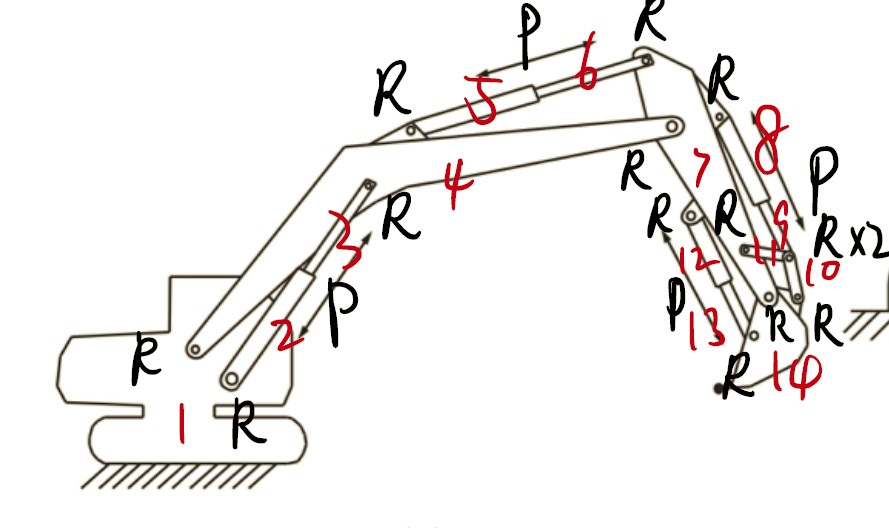
该例子是一个比较好的例子,要注意多个R关节重叠的时候记得都要算上去。
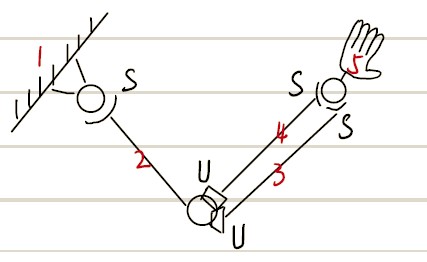
\[m=3,N=14,J=18,\sum{f_i}=18\to dof = 3\times(14-1-18)+18\]并联腿的优缺点
画出该并联机构的工作空间如下
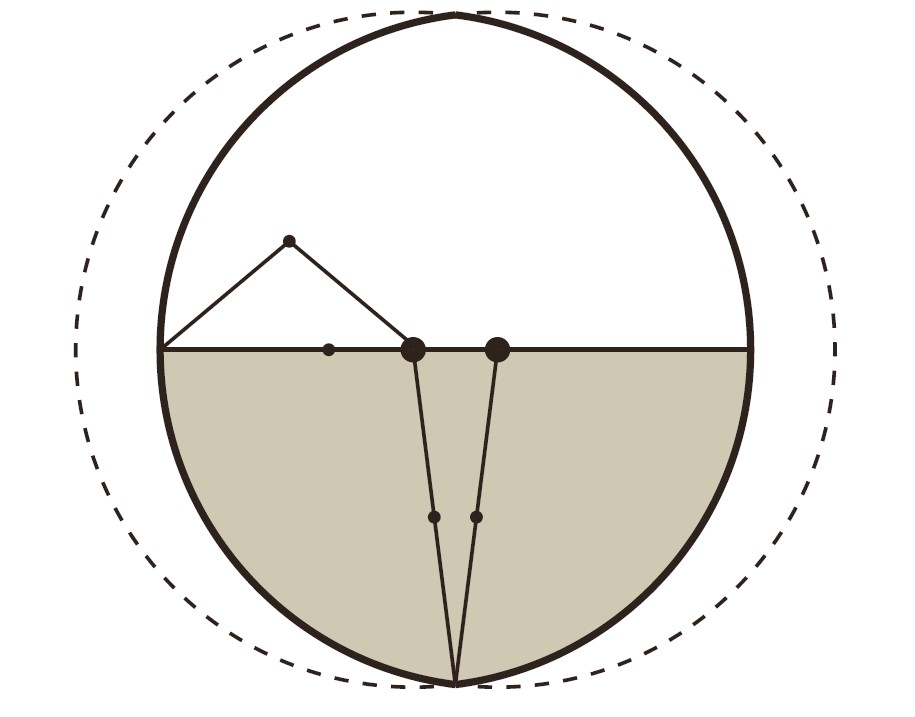
可以看出来,工作空间相对于串联机构还是少了一些的。
但是优点也比较明显:[1] 刚度相对较高。[2] 质量分布更靠近基座,减小了惯量给电机带来的压力。