欢迎来这看看~期待和您的见面!
个人经历:
从小爱玩的我,大学选专业的时候在电子和自动化之间选了这个听起来更智能的专业,于是就开始了和机器人有关的奇妙之旅。
本科阶段在学习之余,跑去划了两次电子设计大赛的水,攒了个光电巡线的小车,第一次触碰到了“机器人”控制系统的概念。再然后,有幸进入赵明国老师的机器人实验室,从此开始了教机器人学会走路的漫漫道路。
[其中足式机器人行走的原理(被动、主动步态blabla)日后有空再更新,这里留空…]
Robocup
从2016年开始参加RoboCup,每年都在不断地进步,这是我感到最开心的!

上面从左至右是16,17,18年参赛的一些照片,比赛的结果当然重要,但RoboCup更像是一个社区,能遇到全世界志同道合的RoboCupers,国外的professors也都是很nice的。我们参加的是Humanoid League中的AdultSize,个人认为是技术难度最大的一项比赛,尤其是把整套硬件+软件的架构设计好,再进行比赛的合规调整,最终获得的成果是属于台前幕后团队内的所有人的。

优必选大仿人项目
研究生期间,实验室和优必选(对就是那个在春晚上展示小机器人跳舞再到大仿人伴舞的那个公司)有一些合作,也经历了一段令人难忘的研发过程。不得不感慨深圳强大的硬件研发能力和创新能力,短短几年就实现了巨大的进步和突破。相信未来的Walker系列能越走越远,实现赶超ASIMO,并最终走入家庭的目标~~~

Walker1刚发布的时候,外观上没有手,只有两个大长腿,我内心一直把这机器人当做小白胖子看待233,好在Walker2的设计已经比较完善了(终于没有人吐槽这机器人不像人了)
腾讯RoboticsX 实验室
研究生阶段做足式还不过瘾,觉得直驱力控才是未来的趋势,加上实验室刚好有这么一个KUKA的机械臂,想也没想就跳进了机械臂的坑。
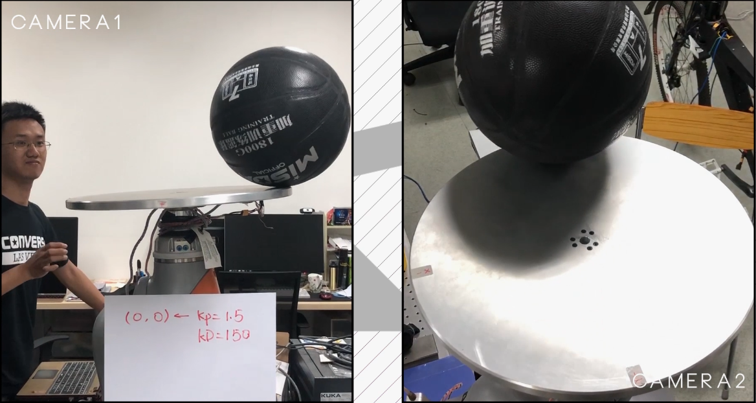
做完了这个板球平衡系统(用末端六维力估计的球的位置),暑假跑去了腾讯张老师的实验室参与了一个工业巡检机器人的项目,正好也是KUKA机械臂,中间又是碰到了无数软硬件系统的坑,一个个踩过去,多亏整个Team的小伙伴都很给力,最终项目的效果也符合预期。

清华机器人实验室
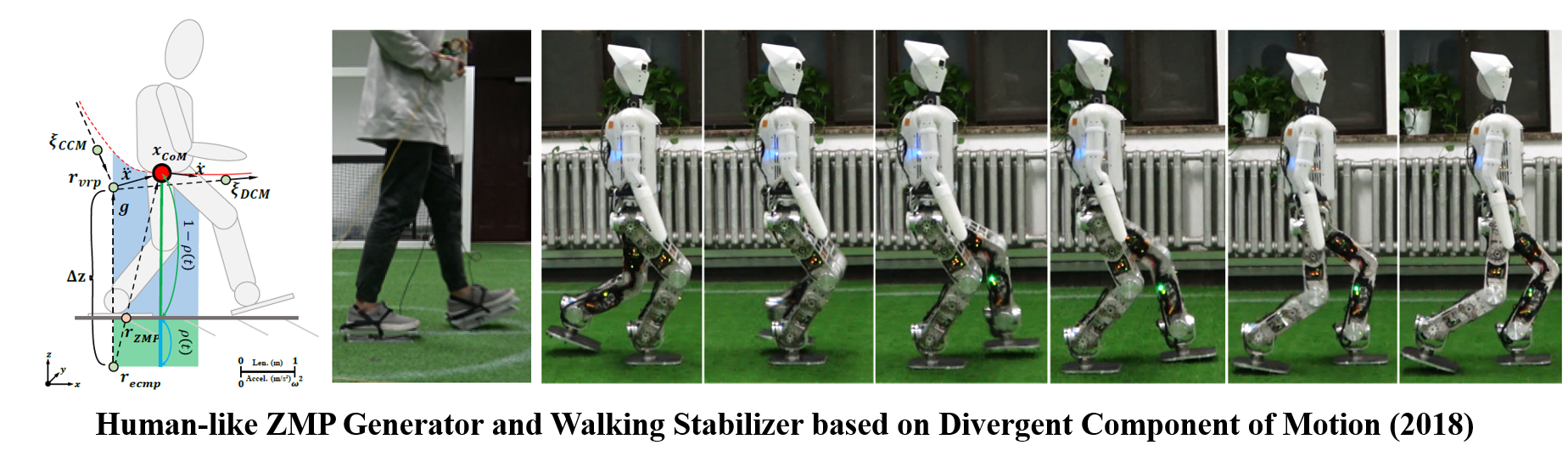
在实验室期间,在机器人行走步态规划和控制方面也发了两篇会议(之所以发会议还是觉得做得工作不够Solid,再等一等看看有没有机会发期刊吧~)
最近一篇是关于如何利用人走路的足底力信号来规划机器人的行走
个人总结
从事足式机器人快五年了,对这个行业也有了一些体会,目前足式机器人除了受限于电池容量、输出功率不足这种机器人通病以外,还有电机(执行机构)输出功率不足,速度和力矩不能很好匹配实际工况等问题,尽管直驱/准直驱已经在四足领域有了一些突破,双足这边浙大、北理也有了一些进展,但是从长远看,要想实现大力矩和高速运动,ETH采用的SEA也是一个方向(尽管SEA会影响整体系统的刚度)。做机器人除了对物理的认知以外,还收到很多工程上的限制,总之要在这个领域发光发热,还是得先学会做一个好的机器人算法工程师吧~~
感谢各位看到最后~
在右边是 王海涛(HeatyWang)的简历
Conference
Technical Report
RoboCup 2019: Tsinghua Hephaestus 2019 AdultSize Team Description
RoboCup 2018: Tsinghua Hephaestus 2018 AdultSize Team Description
RoboCup 2017: Tsinghua Hephaestus 2017 AdultSize Team Description